Координаты и векторы. Исчерпывающий гид (2020). Векторы Равные и равные по длине векторы
Будут и задачи для самостоятельного решения, к которым можно посмотреть ответы.
Понятие вектора
Прежде чем Вы узнаете всё о векторах и операциях над ними, настройтесь на решение несложной задачи. Есть вектор Вашей предприимчивости и вектор Ваших инновационных способностей. Вектор предприимчивости ведёт Вас к Цели 1, а вектор инновационных способностей - к Цели 2. Правила игры таковы, что Вы не можете двигаться сразу по направлениям двух этих векторов и достигнуть сразу двух целей. Векторы взаимодействуют, или, если говорить математическим языком, над векторами производится некоторая операция. Результатом этой операции становится вектор "Результат", который приводит Вас к Цели 3.
А теперь скажите: результатом какой операции над векторами "Предприимчивость" и "Инновационные способности" является вектор "Результат"? Если не можете сказать сразу, не унывайте. По мере изучения этого урока Вы сможете ответить на этот вопрос.
Как мы уже увидели выше, вектор обязательно идёт от некоторой точки A по прямой к некоторой точке B . Следовательно, каждый вектор имеет не только числовое значение - длину, но также физическое и геометрическое - направленность. Из этого выводится первое, самое простое определение вектора. Итак, вектор - это направленный отрезок, идущий от точки A к точке B . Обозначается он так: .

А чтобы приступить к различным операциям с векторами , нам нужно познакомиться с ещё одним определением вектора.
Вектор - это вид представления точки, до которой требуется добраться из некоторой начальной точки. Например, трёхмерный вектор, как правило, записывается в виде (х, y, z ) . Говоря совсем просто, эти числа означают, как далеко требуется пройти в трёх различных направлениях, чтобы добраться до точки.
Пусть дан вектор. При этом x = 3 (правая рука указывает направо), y = 1 (левая рука указывает вперёд), z = 5 (под точкой стоит лестница, ведущая вверх). По этим данным вы найдёте точку, проходя 3 метра в направлении, указываемом правой рукой, затем 1 метр в направлении, указываемом левой рукой, а далее Вас ждёт лестница и, поднимаясь на 5 метров, Вы, наконец, окажетесь в конечной точке.
Все остальные термины - это уточнения представленного выше объяснения, необходимые для различных операций над векторами, то есть, решения практических задач. Пройдёмся по этим более строгим определениям, останавливаясь на типичных задачах на векторы.
Физическими примерами векторных величин могут служить смещение материальной точки, двигающейся в пространстве, скорость и ускорение этой точки, а также действующая на неё сила.

Геометрический вектор представлен в двумерном и трёхмерном пространстве в виде направленного отрезка . Это отрезок, у которого различают начало и конец.
Если A - начало вектора, а B - его конец, то вектор обозначается символом или одной строчной буквой . На рисунке конец вектора указывается стрелкой (рис. 1)
Длиной (или модулем ) геометрического вектора называется длина порождающего его отрезка
Два вектора называются равными , если они могут быть совмещены (при совпадении направлений) путём параллельного переноса, т.е. если они параллельны, направлены в одну и ту же сторону и имеют равные длины.
В физике часто рассматриваются закреплённые векторы , заданные точкой приложения, длиной и направлением. Если точка приложения вектора не имеет значения, то его можно переносить, сохраняя длину и направление в любую точку пространства. В этом случае вектор называется свободным . Мы договоримся рассматривать только свободные векторы .
Линейные операции над геометрическими векторами
Умножение вектора на число
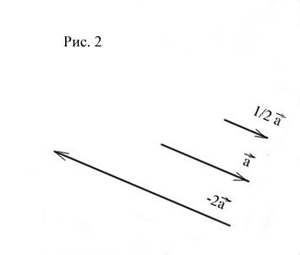
Произведением вектора на число называется вектор, получающийся из вектора растяжением (при ) или сжатием (при ) в раз, причём направление вектора сохраняется, если , и меняется на противоположное, если . (Рис. 2)
Из определения следует, что векторы и = всегда расположены на одной или на параллельных прямых. Такие векторы называются коллинеарными . (Можно говорить также, что эти векторы параллельны, однако в векторной алгебре принято говорить "коллинеарны".) Справедливо и обратное утверждение: если векторы и коллинеарны, то они связаны отношением
Следовательно, равенство (1) выражает условие коллинеарности двух векторов.

Сложение и вычитание векторов
При сложении векторов нужно знать, что суммой векторов и называется вектор , начало которого совпадает с началом вектора , а конец - с концом вектора , при условии, что начало вектора приложено к концу вектора . (Рис. 3)

Это определение может быть распределено на любое конечное число векторов. Пусть в пространстве даны n
свободных векторов . При сложении
нескольких векторов за их сумму принимают замыкающий вектор, начало которого
совпадает с началом первого вектора, а конец - с концом последнего вектора. То есть, если к концу вектора
приложить начало вектора , а к концу вектора
- начало вектора и т.д. и, наконец, к концу вектора
- начало вектора , то
суммой этих векторов служит замыкающий вектор ![]() , начало которого совпадает с началом первого вектора
, а конец - с концом последнего вектора . (Рис. 4)
, начало которого совпадает с началом первого вектора
, а конец - с концом последнего вектора . (Рис. 4)
Слагаемые называются составляющими вектора , а сформулированное правило - правилом многоугольника . Этот многоугольник может и не быть плоским.
При умножении вектора на число -1 получается противоположный вектор . Векторы и имеют одинаковые длины и противоположные направления. Их сумма даёт нулевой вектор , длина которого равна нулю. Направление нулевого вектора не определено.
В векторной алгебре нет необходимости рассматривать отдельно операцию вычитания: вычесть из вектора
вектор
означает прибавить к вектору противоположный вектор
, т.е. ![]()
Пример 1. Упростить выражение:
![]() .
.
 ,
,
то есть, векторы можно складывать и умножать на числа так же, как и многочлены (в частности, также задачи на упрощение выражений). Обычно необходимость упрощать линейно подобные выражения с векторами возникает перед вычислением произведений векторов.
Пример 2. Векторы и служат диагоналями параллелограмма ABCD (рис. 4а). Выразить через и векторы , , и , являющиеся сторонами этого параллелограмма.

Решение. Точка пересечения диагоналей параллелограмма делит каждую диагональ пополам. Длины требуемых в условии задачи векторов находим либо как половины сумм векторов, образующих с искомыми треугольник, либо как половины разностей (в зависимости от направления вектора, служащего диагональю), либо, как в последнем случае, половины суммы, взятой со знаком минус. Результат - требуемые в условии задачи векторы:
Есть все основания полагать, что теперь Вы правильно ответили на вопрос о векторах "Предприимчивость" и "Инновационные способности" в начале этого урока. Правильный ответ: над этими векторами производится операция сложения.
Решить задачи на векторы самостоятельно, а затем посмотреть решения
Как найти длину суммы векторов?
Эта задача занимает особое место в операциях с векторами, так как предполагает использование тригонометрических свойств. Допустим, Вам попалась задача вроде следующей:
Даны длины векторов ![]() и длина суммы этих векторов .
Найти длину разности этих векторов .
и длина суммы этих векторов .
Найти длину разности этих векторов .
Решения этой и других подобных задач и объяснения, как их решать - в уроке "Сложение векторов: длина суммы векторов и теорема косинусов ".
А проверить решение таких задач можно на Калькуляторе онлайн "Неизвестная сторона треугольника (сложение векторов и теорема косинусов)" .
А где произведения векторов?
Произведения вектора на вектор не являются линейными операциями и рассматриваются отдельно. И у нас есть уроки "Скалярное произведение векторов " и "Векторное и смешанное произведения векторов ".
Проекция вектора на ось
Проекция вектора на ось равна произведению длины проектируемого вектора на косинус угла между вектором и осью:
![]()
Как известно, проекцией точки A на прямую (плоскость) служит основание перпендикуляра , опущенного из этой точки на прямую (плоскость).

Пусть - произвольный вектор (Рис. 5), а и - проекции его начала (точки A ) и конца (точки B ) на ось l . (Для построения проекции точки A ) на прямую проводим через точку A плоскость, перпендикулярную прямой. Пересечение прямой и плоскости определит требуемую проекцию.
Составляющей вектора на оси l называется такой вектор , лежащий на этой оси, начало которого совпадает с проекцией начала, а конец - с проекцией конца вектора .
Проекцией вектора на ось l называется число
![]() ,
,
равное длине составляющего вектора на этой оси, взятое со знаком плюс, если направление составляюшей совпадает с направлением оси l , и со знаком минус, если эти направления противоположны.
Основные свойства проекций вектора на ось:
1. Проекции равных векторов на одну и ту же ось равны между собой.
2. При умножении вектора на число его проекция умножается на это же число.
3. Проекция суммы векторов на какую-либо ось равна сумме проекций на эту же ось слагаемых векторов.
4. Проекция вектора на ось равна произведению длины проектируемого вектора на косинус угла между вектором и осью:
![]()
 .
.

Решение. Спроектируем векторы на ось l как определено в теоретической справке выше. Из рис.5а очевидно, что проекция суммы векторов равна сумме проекций векторов. Вычисляем эти проекции:
Находим окончательную проекцию суммы векторов:
Связь вектора с прямоугольной декартовой системой координат в пространстве
Знакомство с прямоугольной декартовой системой координат в пространстве состоялось в соответствующем уроке , желательно открыть его в новом окне.
В упорядоченной системе координатных осей 0xyz ось Ox называется осью абсцисс , ось 0y – осью ординат , и ось 0z – осью аппликат .

С произвольной точкой М пространства свяжем вектор
называемый радиус-вектором точки М и спроецируем его на каждую из координатных осей. Обозначим величины соответствующих проекций:
Числа x, y, z называются координатами точки М , соответственно абсциссой , ординатой и аппликатой , и записываются в виде упорядоченной точки чисел: M (x; y; z) (рис.6).
Вектор единичной длины, направление которого совпадает с направлением оси, называют единичным вектором (или ортом ) оси. Обозначим через
Соответственно орты координатных осей Ox , Oy , Oz
![]()
Теорема. Всякий вектор может быть разложен по ортам координатных осей:

![]() (2)
(2)
Равенство (2) называется разложением вектора по координатным осям. Коэффициентами этого разложения являются проекции вектора на координатные оси. Таким образом, коэффициентами разложения (2) вектора по координатным осям являются координаты вектора.
После выбора в пространстве определённой системы координат вектор и тройка его координат однозначно определяют друг друга, поэтому вектор может быть записан в форме
Представления вектора в виде (2) и (3) тождественны.
Условие коллинеарности векторов в координатах
Как мы уже отмечали, векторы называются коллинеарными, если они связаны отношением
Пусть даны векторы ![]() .
Эти векторы коллинеарны, если координаты векторов связаны отношением
.
Эти векторы коллинеарны, если координаты векторов связаны отношением
![]() ,
,
то есть, координаты векторов пропорциональны.
Пример 6.
Даны векторы ![]() .
Коллинеарны ли эти векторы?
.
Коллинеарны ли эти векторы?
Решение. Выясним соотношение координат данных векторов:
![]() .
.
Координаты векторов пропорциональны, следовательно, векторы коллинеарны, или, что то же самое, параллельны.
Длина вектора и направляющие косинусы
Вследствие взаимной перпендикулярности координатных осей длина вектора
![]()
равна длине диагонали прямоугольного параллелепипеда, построенного на векторах
и выражается равенством
![]() (4)
(4)
Вектор полностью определяется заданием двух точек (начала и конца), поэтому координаты вектора можно выразить через координаты этих точек.
Пусть в заданной системе координат начало вектора находится в точке
а конец – в точке


Из равенства
Следует, что
или в координатной форме
Следовательно, координаты вектора равны разностям одноимённых координат конца и начала вектора . Формула (4) в этом случае примет вид
Направление вектора определяют направляющие косинусы . Это косинусы углов, которые вектор образует с осями Ox , Oy и Oz . Обозначим эти углы соответственно α , β и γ . Тогда косинусы этих углов можно найти по формулам
Направляющие косинусы вектора являются также координатами орта этого вектора и, таким образом, орт вектора

![]() .
.
Учитывая, что длина орта вектора равна одной единице, то есть
![]() ,
,
получаем следующее равенство для направляющих косинусов:
Пример 7. Найти длину вектора x = (3; 0; 4).
Решение. Длина вектора равна
![]()
Пример 8. Даны точки:
Выяснить, равнобедренный ли треугольник, построенный на этих точках.
Решение. По формуле длины вектора (6) найдём длины сторон и установим, есть ли среди них две равные:

Две равные стороны нашлись, следовательно необходимость искать длину третьей стороны отпадает, а заданный треугольник является равнобедренным.
Пример 9.
Найти длину вектора
и его направляющие косинусы, если ![]() .
.
Решение. Координаты вектора даны:
![]() .
.
Длина вектора равна квадратному корню из суммы квадратов координат вектора:
![]() .
.
Находим направляющие косинусы:

Решить задачу на векторы самостоятельно, а затем посмотреть решение
Операции над векторами, заданными в координатной форме
Пусть даны два вектора и , заданные своими проекциями:
![]()
![]()
Укажем действия над этими векторами.
Дата создания: 2009-04-11 15:25:51
Последний раз редактировалось: 2012-02-08 09:19:45
Долго я не хотел писать данную статью - думал как подавать материал. Ещё и картинки нужно рисовать. Но, видать сегодня удачно сложились звёзды и статье про векторы быть. Хотя, это всего лишь черновой вариант. В будущем данную статью разобью на несколько отдельных - материала достаточно. Также, постепенно статья будет улучшаться: буду вносить в неё изменения - т.к. за один присест не получится раскрыть все аспекты.
Векторы были введены в математику в девятнадцатом века, для описания величин, которые трудно было описывать с помощью скалярных значений.
Векторы интенсивно применяются при разработке компьютерных игр. Применяются они не только традиционно - для описания таких величин как сила или скорость, но и в областях, которые казалось бы никак не связаны с векторами: хранение цвета, создание теней.
Скаляры и векторы
Для начала напомню, что такое скаляр, и чем он отличается от вектора.
Скалярные значения хранят какую-то величину: масса, объём. То есть это сущность, которая характеризуется только одним числом (например, количество чего-либо).
Вектор в отличии от скаляра описывается с помощью двух значений: величина и направление.
Важное отличие векторов от координат: векторы не привязаны к конкретному местоположению! Ещё раз повторюсь, главное в векторе - длина и направление.
Вектор обозначается жирной буквой латинского алфавита. Например: a , b , v .
На первом рисунке можно увидеть как вектор обозначают на плоскости.
Векторы в пространстве
В пространстве векторы можно выражать с помощью координат. Но прежде нужно ввести одно понятие:
Радиус-вектор точки
Возьмём в пространстве какую-нибудь точку M(2,1). Радиус-вектор точки - это вектор начинающийся в начале координат и заканчивающийся в точке.
У нас здесь ни что иное как вектор OM . Координаты начала вектора (0,0), координаты конца (2,1). Обозначима этот вектор как a .
В данном случае вектор можно записать следующим образом a = <2, 1>. Это координатная форма вектора a .
Координаты вектора называются его компонентами относительно осей. Напрмер, 2 - компонета вектора a относительно оси x.
Давайте ещё раз остановимся на том, что такое координаты точки. Координата точки (например x) - это проекция точки на ось, т.е. основание перпендикуляра, опущенного из точки на ось. В нашем примере 2.
Но вернёмся к первому рисунку. У нас здесь две точки A и B. Пусть координатами точек будут (1,1) и (3,3). Вектор v в данном случае можно обозначить так v = <3-1, 3-1>. Вектор лежащий в двух точках трёхмерного пространстве будет выглядеть так:
v
=
Думаю никаких сложностей тут нет.
Умножение вектора на скаляр
Вектор можно умножать на скалярные значения:
kv
=
При этом скалярное значение перемножается с каждой компонентой вектора.
Если k > 1, то вектор увеличится, если k меньше единицы, но больше нуля - вектор уменьшится в длину. Если же k меньше нуля, то вектор поменяет направление.
Единичные векторы
Единичные векторы - это векторы длина которых равна единице. Заметьте, вектор с координатами <1,1,1> не будет равным единице! Нахождение длины вектора описано ниже по тексту.
Существуют так называемые орты - это единичные векторы, которые по направлению совпадают с осями координат. i - орт оси x, j - орт оси y, k - орт оси z.
При этом i = <1,0,0>, j = <0,1,0>, k = <0,0,1>.
Теперь мы знаем что такое умножение вектора на скаляр и что такое единичные векторы. Теперь мы можем записать v в векторной форме.
v = v x i + v y j + v z k , где v x , v y , v z - соответствующие компоненты вектора
Сложение векторов
Чтобы полностью разобраться в предыдущей формуле необходимо понять, как работает сложение векторов.
Тут всё просто. Возьмём два вектора v1 =
v 1 + v 2 =
Мы всего лишь складываем соответствующие компоненты двух векторов.
Разность вычисляется так же.
Это, что касается математической формы. Для полноты, стоит рассмотреть как будет выглядеть сложение и вычитание векторов графически.

Для того, чтобы сложить два вектора a +b . Нужно совместить начало вектора b и конец вектора a . Затем, между началом вектора a и концом вектора b провести новый вектор. Для наглядности смотрите второй рисунок (буква "а").
Для вычитания векторов нужно совместить начала двух векторов и провести новый вектор из конца второго вектора к концу первого. На втором рисунке (буква "б") показано как оно выглядит.
Длина и направление вектора
Сначала рассмотрим длину.
Длина - это числовое значение вектора, без учёта направления.
Длина определяется по формуле (для трёхмерного вектора):
корень квадратный из суммы квадратов компонент вектора.
Знакомая формула, не правда ли? В общем-то - это формула длины отрезка
Направление вектора определяется по направляющим косинусам углов образованных между вектором и осями координат. Для нахождения направляющих косинусов используются соответствующие компоненты и длина (картинка будет позже).
Представление векторов в программах
Представлять векторы в программах можно различными способами. Как с помощью обычных переменных, что не эффективно, так и с помощью массивов, классов и структур.
Float vector3 = {1,2,3}; // массив для хранения вектора struct vector3 // структура для хранения векторов { float x,y,z; };
Самые большие возможности при хранении векторов нам предоставляют классы. В классах мы можем описать не только сам вектор (переменные), но и векторные операции (функции).
Скалярное произведение векторов
Существует два типа перемножения векторов: векторное и скалярное.
Отличительная особенность скалярного произведения - в результате всегда будет скалярное значение, т.е. число.
Тут стоит обратить внимание вот на какой момент. Если результат данной операции равен нулю, значит, два вектора перпендикулярны - угол между ними 90 градусов. Если результат больше нуля - угол меньше 90 градусов. Если результат меньше нуля, угол больше 90 градусов.
Данную операцию представляет следующая формула:
a · b = a x *b x + a y *b y + a z *b z
Скалярное произведение - это сумма произведений соответствующих компонент двух векторов. Т.е. Берём x"ы двух векторов, перемножаем их, затем складываем с произведением y"ов и так далее.
Векторное произведение векторов
Результатом векторного произведения двух векторов будет вектор перпендикулярный этим векторам.
Мы пока не будем обсуждать подробно эту формулу. К тому же она довольно трудна для запоминания. Мы ещё вернёмся к этому моменту после знакомства с определителями.
Ну и для общего развития полезно знать, что длина полученного вектора, равна площади параллелограмма построенного на векторах a и b .
Нормализация вектора
Нормализованный вектор - это вектор, длина которого равна единице.
Формула для нахождения нормализованного вектора следующая - все компоненты вектора необходимо разделить на его длину:
v
n = v
/|v| =
Послесловие
Как Вы, наверное, убедились, векторы не сложны для понимания. Мы рассмотрели ряд операций над векторами.
В следующих статьях раздела "математика" мы будем обсуждать матрицы, определители, системы линейных уравнений. Это всё теория.
После этого, мы рассмотрим преобразования матриц. Именно тогда Вы поймёте насколько важна математика в создании компьютерных игр. Данная тема как раз и станет практикой по всем предыдущим темам.
Страница 1 из 2
Вопрос 1.
Что такое вектор? Как обозначаются векторы?
Ответ.
Вектором мы будем называть направленный отрезок (рис. 211). Направление вектора определяется указанием его начала и конца. На чертеже направление вектора отмечается стрелкой. Для обозначения векторов будем пользоваться строчными латинскими буквами a, b, c, ... . Можно также обозначить вектор указанием его начала и конца. При этом начало вектора ставится на первом месте. Вместо слова "вектор" над буквенным обозначением вектора иногда ставится стрелка или черта. Вектор на рисунке 211 можно обозначить так:
\(\overline{a}\), \(\overrightarrow{a}\) или \(\overline{AB}\), \(\overrightarrow{AB}\).
Вопрос 2.
Какие векторы называются одинаково направленными (противоположно направленными)?
Ответ.
Векторы \(\overline{AB}\) и \(\overline{CD}\) называются одинаково направленными, если полупрямые AB и CD одинаково направлены.
Векторы \(\overline{AB}\) и \(\overline{CD}\) называются противоположно направленными, если полупрямые AB и CD противоположно направлены.
На рисунке 212 векторы \(\overline{a}\) и \(\overline{b}\) одинаково направлены, а векторы \(\overline{a}\) и \(\overline{c}\) противоположно направлены.

Вопрос 3.
Что такое абсолютная величина вектора?
Ответ.
Абсолютной величиной (или модулем) вектора называется длина отрезка, изображающего вектор. Абсолютная величина вектора \(\overline{a}\) обозначается |\(\overline{a}\)|.
Вопрос 4.
Что такое нулевой вектор?
Ответ.
Начало вектора может совпадать с его концом. Такой вектор будем называть нулевым вектором. Нулевой вектор обозначается нулём с чёрточкой (\(\overline{0}\)). О направлении нулевого вектора не говорят. Абсолютная величина нулевого вектора считается равной нулю.
Вопрос 5.
Какие векторы называются равными?
Ответ.
Два вектора называются равными, если они совмещаются параллельным переносом. Это означает, что существует параллельный перенос, который переводит начало и конец одного вектора соответственно в начало и конец другого вектора.
Вопрос 6.
Докажите, что равные векторы одинаково направлены и равны по абсолютной величине. И обратно: одинаково направленные векторы, равные по абсолютной величине, равны.
Ответ.
При параллельном переносе вектор сохраняет своё направление, а также свою абсолютную величину. Значит, равные векторы направлены одинаково и равны по абсолютной величине.
Пусть \(\overline{AB}\) и \(\overline{CD}\) – одинаково направленные векторы, равные по абсолютной величине (рис. 213). Параллельный перенос, переводящий точку C в точку A, совмещает полупрямую CD с полупрямой AB, так как они одинаково направлены. А так как отрезки AB и CD равны, то при этом точка D совмещается с точкой B, т.е. параллельный перенос переводит вектор \(\overline{CD}\) в вектор \(\overline{AB}\). Значит, векторы \(\overline{AB}\) и \(\overline{CD}\) равны, что и требовалось доказать.

Вопрос 7.
Докажите, что от любой точки можно отложить вектор, равный данному вектору, и только один.
Ответ.
Пусть CD – прямая, а вектор \(\overline{CD}\) – часть прямой CD. Пусть AB – прямая, в которую переходит прямая CD при параллельном переносе, \(\overline{AB}\) – вектор, в который при параллельном переносе переходит вектор \(\overline{CD}\), а значит, векторы \(\overline{AB}\) и \(\overline{CD}\) равны, а прямые AB и CD параллельны (см. рис. 213). Как мы знаем, через точку не лежащую на данной прямой, можно провести на плоскости не более одной прямой, параллельной данной (аксиома параллельных прямых). Значит, через точку A можно провести одну прямую, параллельную прямой CD. Так как вектор \(\overline{AB}\) – часть прямой AB, то через точку A можно провести один вектор \(\overline{AB}\), равный вектору \(\overline{CD}\).
Вопрос 8.
Что такое координаты вектора? Чему равна абсолютная величина вектора с координатами a 1 , a 2 ?
Ответ.
Пусть вектор \(\overline{a}\) имеет началом точку A 1 (x 1 ; y 1), а концом точку A 2 (x 2 ; y 2). Координатами вектора \(\overline{a}\) будем называть числа a 1 = x 2 - x 1 , a 2 = y 2 - y 1 . Координаты вектора будем ставить рядом с буквенным обозначением вектора, в данном случае \(\overline{a}\) (a 1 ; a 2) или просто \((\overline{a 1 ; a 2 })\). Координаты нулевого вектора равны нулю.
Из формулы, выражающей расстояние между двумя точками через их координаты, следует, что абсолютная величина вектора с координатами a 1 , a 2 равна \(\sqrt{a^2 1 + a^2 2 }\).
Вопрос 9.
Докажите, что равные векторы имеют соответственно равные координаты, а векторы с соответственно равными координатами равны.
Ответ.
Пусть A 1 (x 1 ; y 1) и A 2 (x 2 ; y 2) – начало и конец вектора \(\overline{a}\). Так как равный ему вектор \(\overline{a"}\) получается из вектора \(\overline{a}\) параллельным переносом, то его началом и концом будут соответственно A" 1 (x 1 + c; y 1 + d), A" 2 (x 2 + c; y 2 + d). Отсюда видно, что оба вектора \(\overline{a}\) и \(\overline{a"}\) имеют одни и те же координаты: x 2 - x 1 , y 2 - y 1 .
Докажем теперь обратное утверждение. Пусть соответствующие координаты векторов \(\overline{A 1 A 2 }\) и \(\overline{A" 1 A" 2 }\) равны. Докажем, что векторы равны.
Пусть x" 1 и y" 1 - координаты точки A" 1 , а x" 2 , y" 2 - координаты точки A" 2 . По условию теоремы x 2 - x 1 = x" 2 - x" 1 , y 2 - y 1 = y" 2 - y" 1 . Отсюда x" 2 = x 2 + x" 1 - x 1 , y" 2 = y 2 + y" 1 - y 1 . Параллельный перенос, заданный формулами
x" = x + x" 1 - x 1 , y" = y + y" 1 - y 1 ,
переводит точку A 1 в точку A" 1 , а точку A 2 в точку A" 2 , т.е. векторы \(\overline{A 1 A 2 }\) и \(\overline{A" 1 A" 2 }\) равны, что и требовалось доказать.
Вопрос 10.
Дайте определение суммы векторов.
Ответ.
Суммой векторов \(\overline{a}\) и \(\overline{b}\) с координатами a 1 , a 2 и b 1 , b 2 называется вектор \(\overline{c}\) с координатами a 1 + b 1 , a 2 + b a 2 , т.е.
\(\overline{a} (a 1 ; a 2) + \overline{b}(b 1 ; b 2) = \overline{c} (a 1 + b 1 ; a 2 + b 2)\).
Определение Упорядоченную совокупность (x 1 , x 2 , ... , x n) n вещественных чисел называют n-мерным вектором , а числа x i (i = 1,...,n) - компонентами, или координатами,
Пример. Если, например, некоторый автомобильный завод должен выпустить в смену 50 легковых автомобилей, 100 грузовых, 10 автобусов, 50 комплектов запчастей для легковых автомобилей и 150 комплектов для грузовых автомобилей и автобусов, то производственную программу этого завода можно записать в виде вектора (50, 100, 10, 50, 150), имеющего пять компонент.
Обозначения. Векторы обозначают жирными строчными буквами или буквами с чертой или стрелкой наверху, например, a или . Два вектора называются равными , если они имеют одинаковое число компонент и их соответствующие компоненты равны.
Компоненты вектора нельзя менять местами, например, (3, 2, 5, 0, 1) и (2, 3, 5, 0, 1) разные вектора.
Операции над векторами.
Произведением
x
= (x 1 , x 2 , ... ,x n) на действительное число λ называется вектор λ x
= (λ x 1 , λ x 2 , ... , λ x n).
Суммой x = (x 1 , x 2 , ... ,x n) и y = (y 1 , y 2 , ... ,y n) называется вектор x + y = (x 1 + y 1 , x 2 + y 2 , ... , x n + + y n).
Пространство векторов. N -мерное векторное пространство R n определяется как множество всех n-мерных векторов, для которых определены операции умножения на действительные числа и сложение.
Экономическая иллюстрация. Экономическая иллюстрация n-мерного векторного пространства: пространство благ (товаров ). Под товаром мы будем понимать некоторое благо или услугу, поступившие в продажу в определенное время в определенном месте. Предположим, что существует конечное число наличных товаров n; количества каждого из них, приобретенные потребителем, характеризуются набором товаров
x = (x 1 , x 2 , ..., x n),
где через x i обозначается количество i-го блага, приобретенного потребителем. Будем считать, что все товары обладают свойством произвольной делимости, так что может быть куплено любое неотрицательное количество каждого из них. Тогда все возможные наборы товаров являются векторами пространства товаров C = { x = (x 1 , x 2 , ... , x n) x i ≥ 0, i =1,...,n}.
Линейная независимость. Система e 1 , e 2 , ... , e m n-мерных векторов называется линейно зависимой , если найдутся такие числа λ 1 , λ 2 , ... , λ m , из которых хотя бы одно отлично от нуля, что выполняется равенство λ 1 e 1 + λ m e m = 0; в противном случае данная система векторов называется линейно независимой , то есть указанное равенство возможно лишь в случае, когда все λ 1 =λ 2 =...=λ m =0. Геометрический смысл линейной зависимости векторов в R 3 , интерпретируемых как направленные отрезки, поясняют следующие теоремы.
Теорема 1. Система, состоящая из одного вектора, линейно зависима тогда и только тогда, когда этот вектор нулевой.
Теорема 2. Для того, чтобы два вектора были линейно зависимы, необходимо и достаточно, чтобы они были коллинеарны (параллельны).
Теорема 3 . Для того, чтобы три вектора были линейно зависимы, необходимо и достаточно, чтобы они были компланарны (лежали в одной плоскости).
Левая и правая тройки векторов. Тройка некомпланарных векторов a, b, c называется правой , если наблюдателю из их общего начала обход концов векторов a, b, c в указанном порядке кажется совершающимся по часовой стрелке. B противном случае a, b, c - левая тройка . Все правые (или левые) тройки векторов называются одинаково ориентированными.
Базис и координаты. Тройка e 1, e 2 , e 3 некомпланарных векторов в R 3 называется базисом , а сами векторы e 1, e 2 , e 3 - базисными . Любой вектор a может быть единственным образом разложен по базисным векторам, то есть представлен в виде
а = x 1 e 1 + x 2 e 2 + x 3 e 3, (1.1)
числа x 1 , x 2 , x 3 в разложении (1.1) называются координатами a в базисе e 1, e 2 , e 3 и обозначаются a (x 1 , x 2 , x 3).
Ортонормированный базис. Если векторы e 1, e 2 , e 3 попарно перпендикулярны и длина каждого из них равна единице, то базис называется ортонормированным , а координаты x 1 , x 2 , x 3 - прямоугольными. Базисные векторы ортонормированного базиса будем обозначать i, j, k.
Будем предполагать, что в пространстве R 3 выбрана правая система декартовых прямоугольных координат {0, i, j, k }.
Векторное произведение. Векторным произведением а на вектор b называется вектор c , который определяется следующими тремя условиями:
1. Длина вектора c
численно равна площади параллелограмма, построенного на векторах a
и b,
т. е.
c
= |a||b|
sin (a
^b
).
2. Вектор c перпендикулярен к каждому из векторов a и b.
3. Векторы a, b и c , взятые в указанном порядке, образуют правую тройку.
Для векторного произведения c
вводится обозначение c =
[ab
] или
c = a
× b.
Если векторы a и b коллинеарны, то sin(a^b ) = 0 и [ab ] = 0, в частности, [aa ] = 0. Векторные произведения ортов: [ij ]= k, [jk ] = i , [ki ]= j .
Если векторы a и b заданы в базисе i, j, k координатами a (a 1 , a 2 , a 3), b (b 1 , b 2 , b 3), то


Смешанное произведение. Если векторное произведение двух векторов а и b скалярноумножается на третий вектор c, то такое произведение трех векторов называется смешанным произведением и обозначается символом a b c.
Если векторы a, b
и c
в базисе i, j, k
заданы своими координатами
a
(a 1 , a 2 , a 3), b
(b 1 , b 2 , b 3), c
(c 1 , c 2 , c 3), то
 .
.
Смешанное произведение имеет простое геометрическое толкование - это скаляр, по абсолютной величине равный объему параллелепипеда, построенного на трех данных векторах.
Если векторы образуют правую тройку, то их смешанное произведение есть число положительное, равное указанному объему; если же тройка a, b, c - левая, то a b c <0 и V = - a b c , следовательно V = |a b c| .
Координаты векторов, встречающиеся в задачах первой главы, предполагаются заданными относительно правого ортонормированного базиса. Единичный вектор, сонаправленный вектору а, обозначается символом а о. Символом r =ОМ обозначается радиус-вектор точки М, символами а, АВ или |а| , |АВ| обозначаются модули векторов а и АВ.
Пример 1.2. Найдите угол между векторами a = 2m +4n и b = m-n , где m и n - единичные векторы и угол между m и n равен 120 о.
Решение
. Имеем: cos φ = ab
/ab, ab =
(2m
+4n
) (m-n
) = 2 m
2 - 4n
2 +2mn
=
= 2 - 4+2cos120 o = - 2 + 2(-0.5) = -3; a = ; a
2 = (2m
+4n
) (2m
+4n
) =
= 4 m
2 +16mn
+16 n
2 = 4+16(-0.5)+16=12, значит a = . b = ; b
2 =
= (m-n
)(m-n
) = m
2 -2mn
+ n
2 =
1-2(-0.5)+1 = 3, значит b = . Окончательно имеем: cos φ == -1/2, φ = 120 o .
Пример 1.3. Зная векторы AB (-3,-2,6) и BC (-2,4,4),вычислите длину высоты AD треугольника ABC.
Решение
. Обозначая площадь треугольника ABC через S, получим:
S = 1/2 BC AD. Тогда AD=2S/BC, BC= =![]() = 6,
= 6,
S = 1/2| AB ×
AC|
. AC=AB+BC
, значит, вектор AC
имеет координаты
.
ВЕКТОР
В физике и математике вектор - это величина, которая характеризуется своим численным значением и направлением. В физике встречается немало важных величин, являющихся векторами, например сила, положение, скорость, ускорение, вращающий момент, импульс, напряженность электрического и магнитного полей. Их можно противопоставить другим величинам, таким, как масса, объем, давление, температура и плотность, которые можно описать обычным числом, и называются они "скалярами". Векторная запись используется при работе с величинами, которые невозможно задать полностью с помощью обычных чисел. Например, мы хотим описать положение предмета относительно некоторой точки. Мы можем сказать, сколько километров от точки до предмета, но не можем полностью определить его местоположение, пока не узнаем направление, в котором он находится. Таким образом, местонахождение предмета характеризуется численным значением (расстоянием в километрах) и направлением. Графически векторы изображаются в виде направленных отрезков прямой определенной длины, как на рис. 1. Например, для того чтобы представить графически силу в пять килограммов, надо нарисовать отрезок прямой длиной в пять единиц в направлении действия силы. Стрелка указывает, что сила действует от A к B; если бы сила действовала от B к A, то мы бы записали или Для удобства векторы обычно обозначаются полужирными прописными буквами (A, B, C и так далее); векторы A и -A имеют равные численные значения, но противоположны по направлению. Численное значение вектора А называется модулем или длиной и обозначается A или |A|. Это величина, конечно, скаляр. Вектор, начало и конец которого совпадают, называется нулевым и обозначается O.
Два вектора называются равными (или свободными), если их модули и направления совпадают. В механике и физике этим определением, однако, надо пользоваться с осторожностью, так как две равных силы, приложенные к различным точкам тела в общем случае будут приводить к различным результатам. В связи с этим векторы подразделяются на "связанные" или "скользящие", следующим образом: Связанные векторы имеют фиксированные точки приложения. Например, радиус-вектор указывает положение точки относительно некоторого фиксированного начала координат. Связанные векторы считаются равными, если у них совпадают не только модули и направления, но они имеют и общую точку приложения. Скользящими векторами называются равные между собой векторы, расположенные на одной прямой.
Сложение векторов.
Идея сложения векторов возникла из того, что мы можем найти единственный вектор, который оказывает то же воздействие, что и два других вектора вместе. Если для того, чтобы попасть в некоторую точку, нам надо пройти сначала A километров в одном направлении и затем B километров в другом направлении, то мы могли бы достичь нашей конечной точки пройдя C километров в третьем направлении (рис. 2). В этом смысле можно сказать, что

A + B = C.
Вектор C называется "результирующим вектором" A и B, он задается построением, показанным на рисунке; на векторах A и B как на сторонах построен параллелограмм, а C - диагональ, соединяющая начало А и конец В. Из рис. 2 видно, что сложение векторов "коммутативно", т.е. A + B = B + A. Аналогичным образом можно сложить несколько векторов, последовательно соединяя их "непрерывной цепочкой", как показано на рис. 3 для трех векторов D, E и F. Из рис. 3 также видно, что

(D + E) + F = D + (E + F), т.е. сложение векторов ассоциативно. Суммировать можно любое число векторов, причем векторы необязательно должны лежать в одной плоскости. Вычитание векторов представляется как сложение с отрицательным вектором. Например, A - B = A + (-B), где, как определялось ранее, -B - вектор, равный В по модулю, но противоположный по направлению. Это правило сложения может теперь использоваться как реальный критерий проверки, является ли некоторая величина вектором или нет. Перемещения обычно подчиняются условиям этого правила; то же можно сказать и о скоростях; силы складываются таким же образом, как можно было видеть из "треугольника сил". Однако, некоторые величины, обладающие как численными значениями так и направлениями, не подчиняются этому правилу, поэтому не могут рассматриваться как векторы. Примером являются конечные вращения.
Умножение вектора на скаляр. Произведение mA или Am, где m (m № 0) - скаляр, а A - ненулевой вектор, определяется как другой вектор, который в m раз длиннее A и имеет тоже направление что и A, если число m положительно, и противоположное, если m отрицательно, как показано на рис. 4, где m равно 2 и -1/2 соответственно. Кроме того, 1A = A, т.е. при умножении на 1 вектор не изменяется. Величина -1A - вектор, равный A по длине, но противоположный по направлению, обычно записывается как -A. Если А - нулевой вектор и(или) m = 0, то mA - нулевой вектор. Умножение дистрибутивно, т.е.


Мы можем складывать любое число векторов, причем порядок слагаемых не влияет на результат. Верно и обратное: любой вектор раскладывается на две или более "компоненты", т.е. на два вектора или более, которые, будучи сложенными, в качестве результирующего дадут исходный вектор. Например, на рис. 2, A и B - компоненты C. Многие математические действия с векторами упрощаются, если разложить вектор на три компоненты по трем взаимно перпендикулярным направлениям. Выберем правую систему декартовых координат с осями Ox, Oy и Oz как показано на рис. 5. Под правой системой координат мы подразумеваем, что оси x, y и z располагаются так, как могут быть расположены соответственно большой, указательный и средний пальцы правой руки. Из одной правой системы координат всегда можно получить другую правую систему координат соответствующим вращением. На рис. 5, показано разложение вектор A на три компоненты и Они в сумме составляют вектор A , так как


Следовательно,
![]()
Можно было бы также сначала сложить и получитьа затем к прибавить Проекции вектора А на три координатные оси, обозначенные Ax, Ay и Az называются "скалярными компонентами" вектора A:

где a, b и g - углы между A и тремя координатными осями. Теперь введем три вектора единичной длины i, j и k (орты), имеющие то же самое направление, что и соответствующие оси x, y и z. Тогда, если Ax умножить на i, то полученное произведение - это вектор, равный и
Два вектора равны тогда и только тогда, когда равны их соответствующие скалярные компоненты. Таким образом, A = B тогда и только тогда, когда Ax = Bx, Ay = By, Az = Bz. Два вектора можно сложить, складывая их компоненты:

Кроме того, по теореме Пифагора:
![]()
Линейные функции. Выражение aA + bB, где a и b - скаляры, называется линейной функцией векторов A и B. Это вектор, находящийся в той же плоскости, что A и B; если A и B не параллельны, то при изменении a и b вектор aA + bB будет перемещаться по всей плоскости (рис. 6). Если A, B и C не все лежат в одной плоскости, то вектор aA + bB + cC (a, b и c изменяются) перемещается по всему пространству. Предположим, что A, B и C - единичные векторы i, j и k. Вектор ai лежит на оси x; вектор ai + bj может перемещаться по всей плоскости xy; вектор ai + bj + ck может перемещаться по всему пространству.

Можно было бы выбрать четыре взаимно перпендикулярных вектора i, j, k и l и определить четырехмерный вектор как величину A = Axi + Ayj + Azk + Awl
с длиной
![]()
А можно было бы продолжать до пяти, шести или любого числа измерений. Хотя визуально такой вектор представить невозможно, никаких математических трудностей здесь не возникает. Такая запись часто бывает полезна; например, состояние движущейся частицы описывается шестимерным вектором P (x, y, z, px, py, pz), компоненты которого - ее положение в пространстве (x, y, z) и импульс (px, py, pz). Такое пространство называется "фазовым пространством"; если мы рассматриваем две частицы, то фазовое пространство 12-мерное, если три, то 18-ти и так далее. Число размерностей можно неограниченно увеличивать; при этом величины, с которыми мы будем иметь дело, ведут себя во многом также, как те, которые мы рассмотрим в оставшейся части этой статьи, а именно, трехмерные векторы.
Умножение двух векторов.
Правило сложения векторов было получено путем изучения поведения величин, представленных векторами. Нет никаких видимых причин, по которым два вектора нельзя было бы каким-либо образом перемножить, однако это умножение будет иметь смысл только в том случае, если можно показать его математическую состоятельность; кроме того, желательно, чтобы произведение имело определенный физический смысл. Существуют два способа умножения векторов, которые соответствуют этим условиям. Результатом одного из них является скаляр, такое произведение называется "скалярным произведением" или "внутренним произведением" двух векторов и записывается AЧB или (A, B). Результатом другого умножения является вектор, называемый "векторным произведением" или "внешним произведением" и записывается A*B или []. Скалярные произведения имеют физический смысл для одного-, двух- или трех измерений, тогда как векторные произведения определены только для трех измерений.
Скалярные произведения.
Если под действием некоторой силы F точка, к которой она приложена, перемещается на расстояние r, то выполненная работа равна произведению r и компоненты F в направлении r. Эта компонента равна F cos бF, rс, где бF, rс - угол между F и r, т.е. Произведенная работа = Fr cos бF, rс. Это - пример физического обоснования скалярного произведения, определенного для любых двух векторов A, B посредством формулы
A*B = AB cos бA, Bс.
Так как все величины правой части уравнения - скаляры, то A*B = B*A; следовательно, скалярное умножение коммутативно. Скалярное умножение также обладает свойством дистрибутивности: A*(B + С) = A*B + A*С. Если векторы A и B перпендикулярны, то cos бA, Bс равен нулю, и, поэтому, A*B = 0, даже если ни A, ни B не равны нулю. Именно поэтому мы не можем делить на вектор. Допустим, что мы разделили обе части уравнения A*B = A*C на A. Это дало бы B = C, и, если бы можно было бы выполнить деление, то это равенство стало бы единственным возможным результатом. Однако, если мы перепишем уравнение A*B = A*C в виде A*(B - C) = 0 и вспомним, что (B - C) - вектор, то ясно, что (B - C) необязательно равен нулю и, следовательно, B не должен быть равным C. Эти противоречивые результаты показывают, что векторное деление невозможно. Скалярное произведение дает еще один способ записи численного значения (модуля) вектора: A*A = AA*cos 0° = A2;
поэтому
Скалярное произведение можно записать и другим способом. Для этого вспомним, что: A = Ax i + Ayj + Azk. Заметим, что

Тогда,

Поскольку последнее уравнение содержит x, y и z в качестве нижних индексов, уравнение, казалось бы, зависит от выбранной конкретной системы координат. Однако это не так, что видно из определения, которое не зависит от выбранных координатных осей.
Векторные произведения.
Векторным или внешним произведением векторов называется вектор, модуль которого равен произведению их модулей на синус угла, перпендикулярный исходным векторам и составляющий вместе с ними правую тройку. Это произведение легче всего ввести, рассматривая соотношение между скоростью и угловой скоростью. Первая - вектор; мы теперь покажем, что последнюю также можно интерпретировать как вектор. Угловая скорость вращающегося тела определяется следующим образом: выберем любую точку на теле и проведем перпендикуляр из этой точки до оси вращения. Тогда угловая скорость тела - это число радиан, на которые эта линия повернулась за единицу времени. Если угловая скорость - вектор, она должна иметь численное значение и направление. Численное значение выражается в радианах в секунду, направление можно выбрать вдоль оси вращения, можно его определить, направив вектор в том направлении, в котором двигался бы правосторонний винт при вращении вместе с телом. Рассмотрим вращение тела вокруг фиксированной оси. Если установить эту ось внутри кольца, которое в свою очередь закреплено на оси, вставленной внутрь другого кольца, мы можем придать вращение телу внутри первого кольца с угловой скоростью w1 и затем заставить внутреннее кольцо (и тело) вращаться с угловой скоростью w2. Рисунок 7 поясняет суть дела; круговые стрелки показывают направления вращения. Данное тело - это твердая сфера с центром О и радиусом r.

Рис. 7. СФЕРА С ЦЕНТРОМ O, вращается с угловой скоростью w1 внутри кольца BC, которое, в свою очередь, вращается внутри кольца DE с угловой скоростью w2. Сфера вращается с угловой скоростью, равной сумме угловых скоростей и все точки на прямой POP" находятся в состоянии мгновенного покоя.
Придадим этому телу движение, которое является суммой двух различных угловых скоростей. Это движение довольно трудно представить наглядно, но достаточно очевидно, что тело больше не вращается относительно фиксированной оси. Однако все-таки можно сказать, что оно вращается. Чтобы показать это, выберем некоторую точку P на поверхности тела, которая в рассматриваемый нами момент времени находится на большом круге, соединяющем точки, в которых две оси пересекают поверхность сферы. Опустим перпендикуляры из P на оси. Эти перпендикуляры станут радиусами PJ и PK окружностей PQRS и PTUW соответственно. Проведем прямую POPў, проходящую через центр сферы. Теперь точка P, в рассматриваемый момент времени одновременно перемещается по окружностям, которые соприкасаются в точке P. За малый интервал времени Dt, P перемещается на расстояние
Это расстояние равно нулю, если

В этом случае точка P находится в состоянии мгновенного покоя, и точно также все точки на прямой POP". Остальная часть сферы будет в движении (окружности, по которым перемещаются другие точки, не касаются, а пересекаются). POPў является, таким образом, мгновенной осью вращения сферы, подобно тому, как колесо, катящееся по дороге в каждый момент времени, вращается относительно своей нижней точки. Чему равна угловая скорость сферы? Выберем для простоты точку A, в которой ось w1 пересекает поверхность. В момент времени, который мы рассматриваем, она перемещается за время Dt на расстояние
По кругу радиуса r sin w1. По определению, угловая скорость

Из этой формулы и соотношения (1) мы получим
Другими словами, если записать численное значение и выбрать направление угловой скорости так, как это описано выше, то эти величины складываются как векторы и могут быть рассмотрены как таковые. Теперь можно ввести векторное произведение; рассмотрим тело, вращающееся с угловой скоростью w. Выберем любую точку P на теле и любое начало координат О, которое находится на оси вращения. Пусть r - вектор, направленный от О к P. Точка P движется по окружности со скоростью V = w r sin (w, r). Вектор скорости V является касательным к окружности и указывает в направлении, показанном на рис. 8.

Это уравнение дает зависимость скорости V точки от комбинации двух векторов w и r. Используем это соотношение, чтобы определить новый вид произведения, и запишем: V = w * r. Так как результатом такого умножения является вектор, это произведение названо векторным. Для любых двух векторов A и B, если A * B = C, то C = AB sin бA, Bс, и направление вектора C таково, что он перпендикулярен плоскости, проходящей через А и B и указывает в направлении, совпадающем с направлением движения правовращающегося винта, если он параллелен C и вращается от A к B. Другими словами, мы можем сказать, что A, B и C, расположенные в таком порядке, образуют правый набор координатных осей. Векторное произведение антикоммутативно; вектор B * A имеет тот же модуль, что и A * B, но направлен в противоположную сторону: A * B = -B * A. Это произведение дистрибутивно, но не ассоциативно; можно доказать, что

Посмотрим, как записывается векторное произведение в терминах компонент и единичных векторов. Прежде всего, для любого вектора A, A * A = AA sin 0 = 0.
Следовательно, в случае единичных векторов, i * i = j * j = k * k = 0 и i * j = k, j * k = i, k * i = j. Тогда,
Это равенство также можно записать в виде определителя:

Если A * B = 0, то либо A или B равно 0, либо A и B коллинеарны. Таким образом, как и в случае скалярного произведения, деление на вектор невозможно. Величина A * B равна площади параллелограмма со сторонами A и B. Это легко видеть, так как B sin бA, Bс - его высота и A - основание. Существует много других физических величин, которые являются векторными произведениями. Одно из наиболее важных векторных произведений появляется в теории электромагнетизма и называется вектором Пойтинга P. Этот вектор задается следующим образом: P = E * H, где E и H - векторы электрического и магнитного полей соответственно. Вектор P можно рассматривать как заданный поток энергии в ваттах на квадратный метр в любой точке. Приведем еще несколько примеров: момент силы F (крутящий момент) относительно начала координат, действующей на точку, радиус-вектор которой r, определяется как r * F; частица, находящаяся в точке r, массой m и скоростью V, имеет угловой момент mr * V относительно начала координат; сила, действующая на частицу, несущую электрический заряд q через магнитное поле B со скоростью V, есть qV * B.
Тройные произведения.
Из трех векторов мы можем сформировать следующие тройные произведения: вектор (A*B) * C; вектор (A * B) * C; скаляр (A * B)*C. Первый тип - произведение вектора C и скаляра A*B; о таких произведениях мы уже говорили. Второй тип называется двойным векторным произведением; вектор A * B перпендикулярен к плоскости, где лежат A и B, и поэтому (A * B) * C - вектор, лежащий в плоскости A и B и перпендикулярный C. Следовательно, в общем случае, (A * B) * C не равно A * (B * C). Записав A, B и C через их координаты (компоненты) по осям x, y и z и умножив, можно показать, что A * (B * C) = B * (A*C) - C * (A*B). Третий тип произведения, который возникает при расчетах решетки в физике твердого тела, численно равен объему параллелепипеда с ребрами A, B, C. Так как (A * B)*C = A*(B * C), знаки скалярного и векторного умножений можно менять местами, и произведение часто записывается как (A B C). Это произведение равно определителю

Заметим, что (A B C) = 0, если все три вектора лежат в одной и той же плоскости или, если А = 0 или (и) В = 0 или (и) С = 0.
ДИФФЕРЕНЦИРОВАНИЕ ВЕКТОРА
Предположим, что вектор U является функцией одной скалярной переменной t. Например, U может быть радиус-вектором, проведенным из начала координат до перемещающейся точки, а t - временем. Пусть t изменится на небольшую величину Dt, что приведет к изменению U на величину DU. Это показано на рис. 9. Отношение DU/Dt - вектор, направленный в том же направлении, что и DU. Мы можем определить производную U по t, как


при условии, что такой предел существует. С другой стороны, можно представить U как сумму компонент по трем осям и записать

Если U - радиус-вектор r, то dr/dt - скорость точки, выраженная как функция времени. Продифференцировав по времени еще раз, мы получим ускорение. Предположим, что точка перемещается вдоль кривой, показанной на рис. 10. Пусть s - расстояние, пройденное точкой вдоль кривой. В течение малого интервала времени Dt точка пройдет расстояние Ds вдоль кривой; положение радиус-вектора изменится на Dr. Следовательно Dr/Ds - вектор направленный как Dr. Далее

Вектор Dr - изменение радиус-вектора.

есть единичный вектор, касательный к кривой. Это видно из того, что при приближении точки Q к точке P, PQ приближается к касательной и Dr приближается к Ds. Формулы для дифференцирования произведения подобны формулам для дифференцирования произведения скалярных функций; однако, так как векторное произведение антикоммутативно, порядок умножения должен быть сохранен. Поэтому,

Таким образом, мы видим, что, если вектор является функцией одной скалярной переменной, то мы можем представить производную почти также, как в случае скалярной функции.
Вектор и скалярные поля. Градиент.
В физике часто приходится иметь дело с векторными или скалярными величинами, которые меняются от точки к точке в заданной области. Такие области называются "полями". Например, скаляр может быть температурой или давлением; вектор может быть скоростью движущейся жидкости или электростатическим полем системы зарядов. Если мы выбрали некоторую систему координат, то любой точке P (x, y, z) в заданной области соответствует некоторый радиус-вектор r (= xi + yj + zk) и также значение векторной величины U (r) или скаляра f (r), связанных с ним. Предположим, что U и f определены в области однозначно; т.е. каждой точке соответствует одна и только одна величина U или f, хотя различные точки могут, конечно, иметь различные значения. Допустим, что мы хотим описать скорость, с которой U и f изменяются при передвижении по этой области. Простые частные производные, такие, как dU/dx и df/dy, нас не устраивают, потому что они зависят от конкретно выбранных координатных осей. Однако можно ввести векторный дифференциальный оператор, независимый от выбора осей координат; этот оператор называется "градиентом". Пусть мы имеем дело со скалярным полем f. Сначала в качестве примера рассмотрим контурную карту области страны. В этом случае f - высота над уровнем моря; контурные линии соединяют точки с одним и тем же значением f. При движении вдоль любой из этих линий f не меняется; если двигаться перпендикулярно этим линиям, то скорость изменения f будет максимальной. Мы можем каждой точке сопоставить вектор, указывающий величину и направление максимального изменения скорости f; такая карта и некоторые из этих векторов показаны на рис. 11. Если мы проделаем это для каждой точки поля, то получим векторное поле, связанное со скалярным полем f. Это поле вектора, называемого "градиентом" f, который записывается как grad f или Сf (символ С также называется "набла").

В случае трех измерений, контурные линии становятся поверхностями. Малое смещение Dr (= iDx + jDy + kDz) приводит к изменению f, которое записывается как

где точками обозначены члены более высоких порядков. Это выражение можно записать в виде скалярного произведения

Разделим правую и левую части этого равенства на Ds, и пусть Ds стремится к нулю; тогда

где dr/ds - единичный вектор в выбранном направлении. Выражение в круглых скобках - вектор, зависящий от выбранной точки. Таким образом, df/ds имеет максимальное значение, когда dr/ds указывает в том же направлении, выражение, стоящее в скобках, является градиентом. Таким образом,

- вектор, равный по величине и совпадающий по направлению с максимальной скоростью изменения f относительно координат. Градиент f часто записывается в виде

Это означает, что оператор С существует сам по себе. Во многих случаях он ведет себя как вектор и фактически является "векторным дифференциальным оператором" - одним из наиболее важных дифференциальных операторов в физике. Несмотря на то, что С содержит единичные векторы i, j и k, его физический смысл не зависит от выбранной системы координат. Какова связь между Сf и f? Прежде всего предположим, что f определяет потенциал в любой точке. При любом малом смещении Dr величина f изменится на
![]()
Если q - величина (например масса, заряд), перемещенная на Dr, то работа, выполненная при перемещении q на Dr равна
![]()
Так как Dr - перемещение, то qСf - сила; -Сf - напряженность (сила на единицу количества), связанная с f. Например, пусть U - электростатический потенциал; тогда E - напряженность электрического поля, задается формулой E = -СU. Допустим, что U создается точечным электрическим зарядом в q кулонов, помещенным в начало координат. Значение U в точке P (x, y, z) с радиус-вектором r задается формулой
Где e0 - диэлектрическая постоянная свободного пространства. Поэтому

откуда следует, что E действует в направлении r и его величина равна q/(4pe0r3). Зная скалярное поле, можно определить связанное с ним векторное поле. Также возможно и обратное. С точки зрения математической обработки скалярными полями оперировать легче, чем векторными, так как они задаются одной функцией координат, в то время как векторное поле требует три функции, соответствующие компонентам вектора в трех направлениях. Таким образом, возникает вопрос: дано векторное поле, может ли мы записать связанное с ним скалярное поле?
Дивергенция и ротор.
Мы видели результат действия С на скалярную функцию. Что произойдет, если С применить к вектору? Имеются две возможности: пусть U (x, y, z) - вектор; тогда мы можем образовать векторное и скалярное произведения следующим образом:


Первое из этих выражений - скаляр, называемый дивергенцией U (обозначается divU); второе - вектор, названный ротор U (обозначается rotU). Эти дифференциальные функции, дивергенция и ротор, широко используются в математической физике. Представьте, что U - некоторый вектор и что он и его первые производные непрерывны в некоторой области. Пусть P - точка в этой области, окруженная малой замкнутой поверхностью S, ограничивающей объем DV. Пусть n - единичный вектор, перпендикулярный к этой поверхности в каждой точке (n меняет направление при движении вокруг поверхности, но всегда имеет единичную длину); пусть n направлен наружу. Покажем, что
Здесь S указывает, что эти интегралы берутся по всей поверхности, da - элемент поверхности S. Для простоты мы выберем удобную для нас форму S в виде небольшого параллелепипеда (как показано на рис. 12) со сторонами Dx, Dy и Dz; точка P - центр параллелепипеда. Вычислим интеграл из уравнения (4) сначала по одной грани параллелепипеда. Для передней грани n = i (единичный вектор параллелен оси x); Da = DyDz. Вклад в интеграл от передней грани равен

На противоположной грани n = -i; эта грань дает вклад в интеграл

Используя теорему Тейлора, получим общий вклад от двух граней
Заметим, что DxDyDz = DV. Аналогичным образом можно вычислить вклад от двух других пар граней. Полный интеграл равен

и если мы положим DV (r) 0, то члены более высокого порядка исчезнут. По формуле (2) выражение в скобках - это divU, что доказывает равенство (4). Равенство (5) можно доказать таким же образом. Воспользуемся снова рис. 12; тогда вклад от передней грани в интеграл будет равен
И, используя теорему Тейлора, получим, что суммарный вклад в интеграл от двух граней имеет вид

т.е. это два члена из выражения для rotU в уравнении (3). Другие четыре члена получатся после учета вкладов от других четырех граней. Что, в сущности, означают эти соотношения? Рассмотрим равенство (4). Предположим, что U - скорость (жидкости, например). Тогда nЧU da = Un da, где Un является нормальной компонентой вектора U к поверхности. Поэтому, Un da - это объем жидкости, протекающей через da в единицу времени, а- это объем жидкости, вытекающей через S в единицу времени. Следовательно,
Скорость расширения единицы объема вокруг точки P. Отсюда дивергенция получила свое название; она показывает скорость, с которой жидкость расширяется из (т.е. расходится от) P. Чтобы объяснить физическое значение ротора U, рассмотрим другой поверхностный интеграл по маленькому цилиндрическому объему высотой h, окружающему точку P; плоско-параллельные поверхности могут быть ориентированы в любом направлении, которое мы выбираем. Пусть k -единичный вектор перпендикулярный к каждой поверхности, и пусть площадь каждой поверхности DA; тогда полный объем DV = hDA (рис. 13). Рассмотрим теперь интеграл
